摄像机模型
机器视觉
发布于
摄像机模型
本文是鲁鹏老师机器视觉课程的笔记
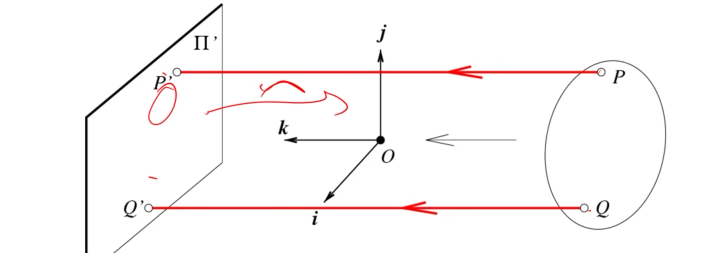
针孔模型与透镜
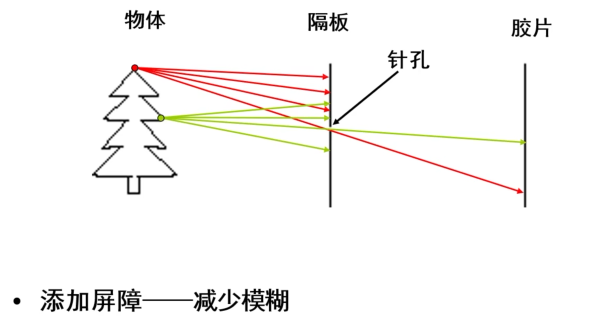
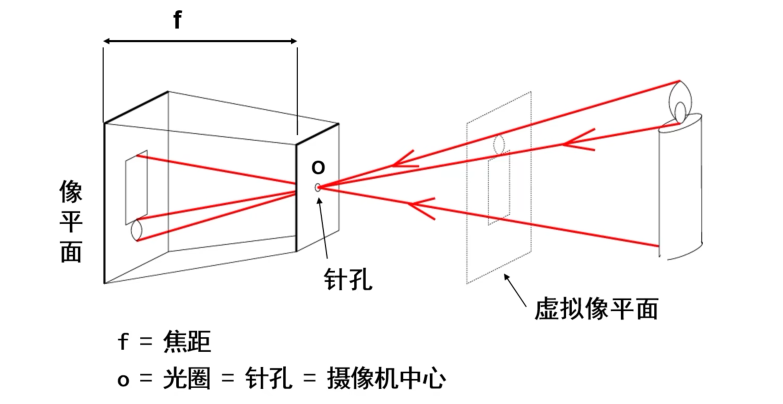
虚拟像平面是倒着的
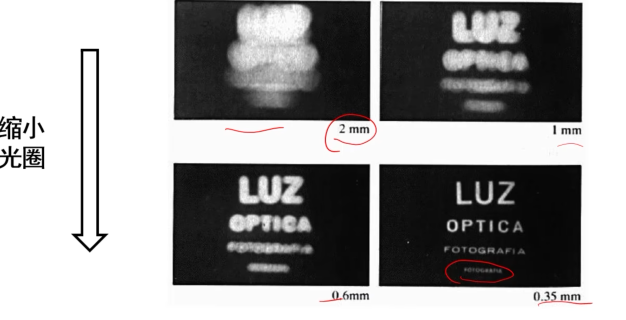
光圈尺寸
光圈偏大会导致场景模糊
光圈偏小会场景清晰,但偏暗
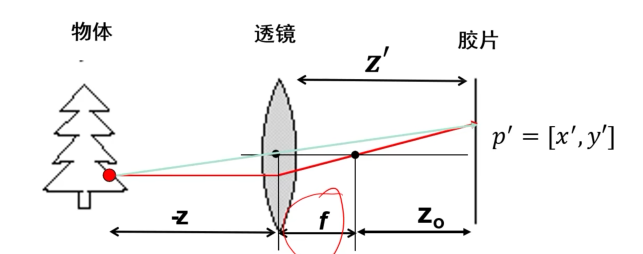
增加透镜
- 透镜将多条光线聚焦到胶片上,增加了照片的亮度:
- 所有平行于光轴的光线都会会聚到焦点,焦点到透镜中心的距离称为焦距
- 穿过中心的光线的方向不发生改变
 根据折射定律: , 是透镜球面半径,是透镜折射系数
根据折射定律: , 是透镜球面半径,是透镜折射系数
要是透镜不合适,则会发生失焦
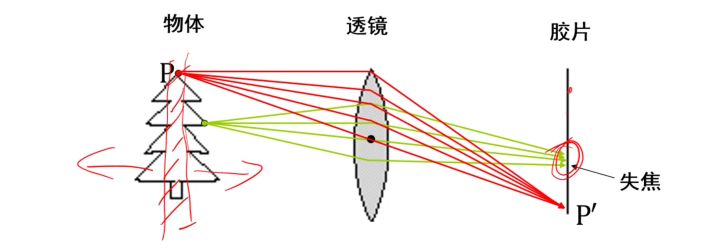
透镜将光线聚焦到胶片上
- 物体“聚焦”有特定距离
- 景深
径向畸变
图像中所成的像发生形变
径向畸变:图像像素点以畸变中心为中心点,沿着径向产生的位置偏差,从而导致
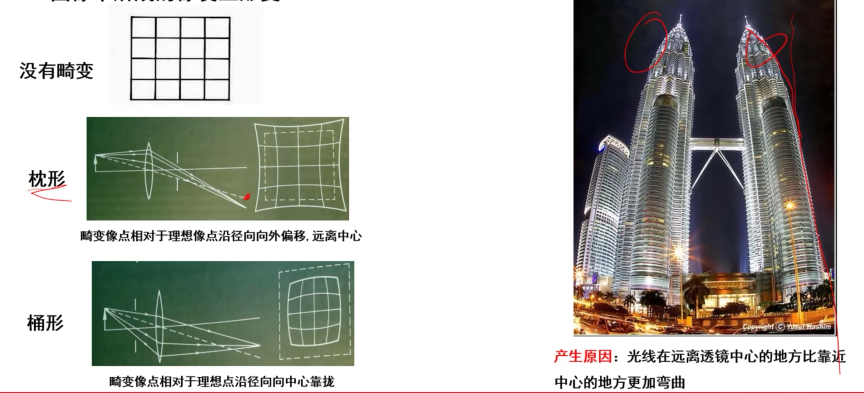
枕形畸变:畸变像点相对于理想像点沿径向向外偏移,远离中心 桶形畸变:畸变像点相对于理想点沿径向向中心靠拢
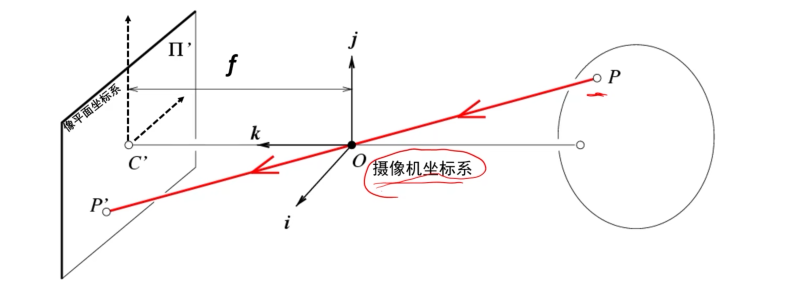
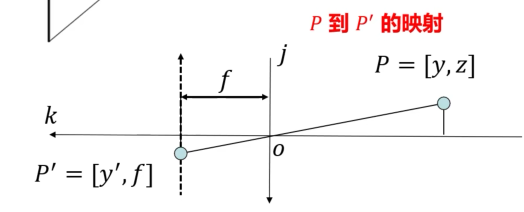
摄像机几何
齐次坐标
图像点的齐次坐标
空间点的齐次坐标
的转变不是唯一的,但 的转变是唯一的
像素坐标系
建立像平面到像素平面关系
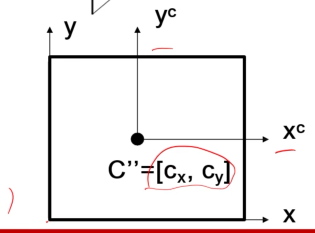
- 偏置
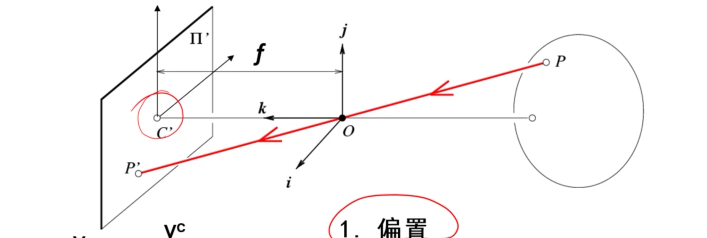
- 单位变换 单位:k.l:pixel/m , f:m k表示竖直方向上多少米表示一个像素,l表示水平方向上多少米表示一个像素
记为 ,为 ,这里的是像素上的偏置
是非线性变换
在齐次坐标系下
是齐次, 是欧式
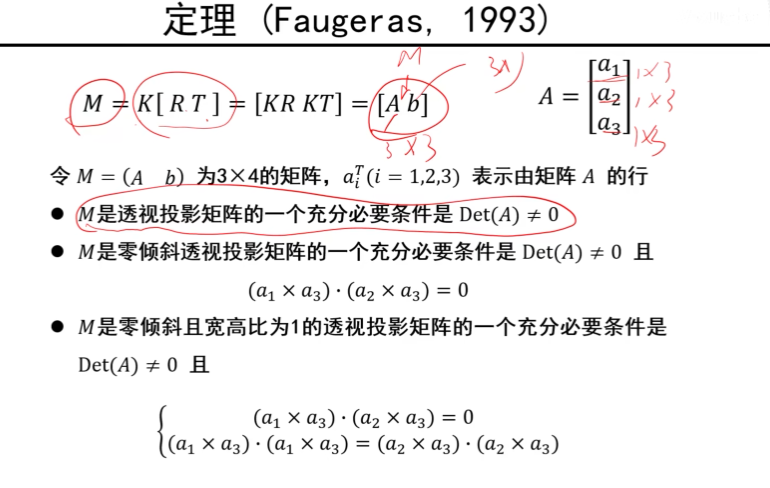
摄像机的投影矩阵
其中
此时和 是线性表示 是矩阵, 是矩阵
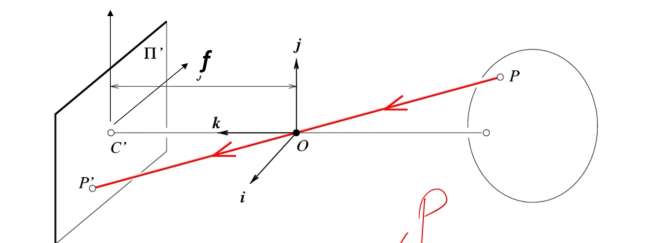
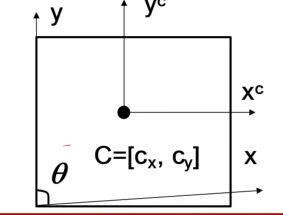
摄像机偏斜
摄像机坐标系下的摄像机模型
被称为投影矩阵,
被称为摄像机内参数矩阵,内参数矩阵决定了摄像机坐标系下空间点到图像点的映射
摄像机内参数为,K有五个自由度
规范化投影变换
已知摄像机矩阵 , ,
的欧式坐标
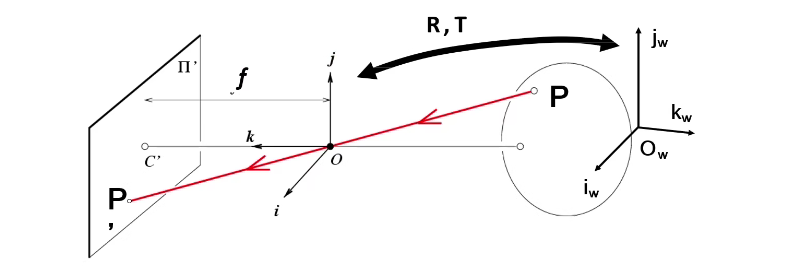
世界坐标系
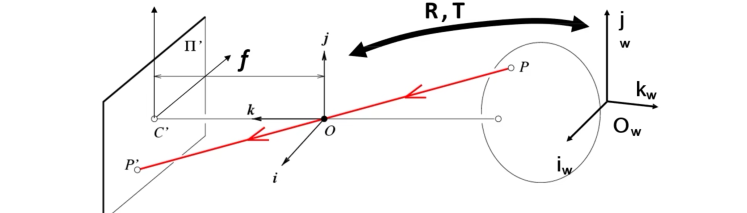
为世界坐标系 摄像机坐标系,像平面坐标系
齐次坐标系 , ,即摄像机坐标系是世界坐标系经过一个旋转,再经过一个平移得到的
世界坐标系下
从世界坐标系到像素坐标系 称为外参数矩阵,K是内参数,这就是完整的摄像机模型
称为投影矩阵,有11个自由度
摄像机O点坐标为
是转换为欧式坐标系的写法, 是一个 的矩阵
投影变化的性质
- 点投影为点
- 线投影为线
- 近大远小
- 角度不再保持
- 平行线相交
其他摄像机模型
透视投影摄像机
^b240bc
弱透视投影摄像机
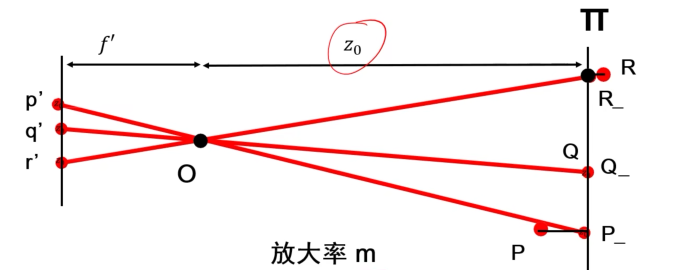
从投影(透视)到弱透视
, 为放大率
正交投影摄像机
各种摄像机模型的应用场合
- 正交投影
- 更多应用在建筑设计(AUTOCAD)或者工业设计行业
- 弱透视投影在数学方面更简单
- 当物体较小且较远时准确,常用于图像识别任务
- 透视投影对于3D到2D映射的建模更为准确
- 用于运动恢复结构或SLAM
